NASAがこのような動画をあげています
OculusとKinectをつかってロボットアームを操作している動画です。
このロボットアーム、調べてみると$48,400(500万くらい)もしてひええ~となるわけですが・・・
この動画を見てて思ったのが自分も同じようなことをしてみたいなということでした。
しかし500万もお金があるはずない!他のロボットアーム買おうにも地味に高い!
自作しよう!!
こうしてロボットアーム製作が決定しました。
~~作業前に書いたメモから引用~~
金属加工できたらできたらいいなぁ
↓
できたらいいなぁと言うぐらいならやろう
精度は仕方ない。やることが大切なのでは?
↓
サーボブラケットがいいらしい
どうやら組み合わせるだけでロボットアームが完成しちゃうかも?
↓
アルミの金属加工が必要
厚さは? 1mmでいいのでは
流れは? 設計、紙に印刷、スプレーのりで接着、穴あけ、切断、折り曲げ
切断はどうする? 1mmならカッターでも出来るっぽい。
折り曲げは? 折り曲げ機は自作できるみたい。
穴あけは? ドリルがある。
ネジきりは? するならタップを買わなきゃいけない。
設計は? 一応cadあるしなんとかなるのでは
サーボは何使う?
小さくて軽くて高トルク
しかし高い
考えて要所要所に必要なものを置かなきゃいけない
肩に当たる部分には高トルク(一番負荷かかる
手首はそこまでいらない
~~作業前に書いたメモから引用終わり~~
頭の中のことをそのまま文字に起こしているので自問自答な文章ですが、作る前に考えたのはこんな感じです。
長期間にわたっダラダラと作業するのはモチベーションが保てず自分には向かないので短期間で終わらせるのを目標としました。
・注文まず最初にサーボを注文しました。
秋月電子で注文。
ネットを見ているとGWSのS03Tの情報が多かったのでS03Tを中心にして作ろうと考えました。
今回使ったのは
S125-1T/2BB 1個(全体の回転用)
S03T/2BBMG 2個(肩、肘用)
S03N/2BBMG 1個(手首用)
MICRO/2BBMG 1個(手の開閉用)
S03Nですが元々持っていたものなので、もし持っていなかったらS03Tを3つ購入にしていたかもしれません。(S03Nよりちょっと長くなっただけでそれなりにトルクがでるから)
サーボの制御ですが、いつも使っているラズベリーパイで行うこととしました。
スイッチサイエンスのサーボドライバを購入。
http://www.switch-science.com/catalog/961/I2C接続なのでラズベリーパイでも簡単に扱えます。
・設計
設計に入る前にサーボブラケットを作るにしてもサーボの動く軸の反対側(反対軸?逆軸?)はどうしようかという問題があります。さすがに片側だけで支持するというわけにはいきません。
ホームセンターにいっていいものはないかと見ていると組みネジというものを見つけました。

これを軸として使うことにしました。
頭の中の3Dモデルをぐるぐる動かしていてもどうしようもないので3D CADでモデルを作って設計図を作ります。
CADは
Inventorを使いました。
学生なら無料で使えます。
http://www.autodesk.com/education/student-softwareノギスでサーボのサイズを測りながらサーボの3Dモデルを作っていきます。
後から知りましたがS03TとMicroに関しては浅草ギ研さんが寸法図を公開してます。
http://www.robotsfx.com/robot/RCServo.html
こんな感じで。かなり簡略化したモデルでいろいろと省略して作ってます。
そしてこれに合うようにサーボブラケットとアームを作っていきます。

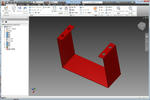
こんな感じ。
サーボブラケットとアームですが、新規作成の時にシートメタルを選択しています。

とりあえず簡単に組み合わせてみる。
本来はここでボルトやねじなどを差し込んで干渉しないかなどチェックするのですが、今回は大丈夫だろうと飛ばしました・・・。そのため後から実際に組み立てた時にネジ同士の干渉を起こしてしまいました。
手の部分、ものをつかむ機構の部分ですがかなり悩みました。
リンク機構を使ってマジックハンドのようなものを作るのもいいなと思ったのですが、サイズが大きくなりそうということで不採用。
ギアが作れるとかなり選択肢が広がるのですが、作る技術がないため今回は
http://robozak.jugem.jp/?eid=1053846 こちらの画像のような片側固定の手にすることにしました。
こんな感じで使うサーボのブラケットとアームのモデルを作っていきました。(S125-1Tは土台に固定するつもりだったのでブラケットは設計していない)
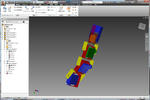
アームの完成予想図。(曲がっていますが・・・)
モデルを作ったのでそれを2Dの設計図にします。
ブラケットとアームはシートメタルで作ったので、フラットパターン(折りたたむ前の段階)にできてかなり楽です。
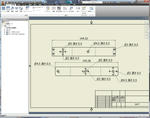
こうなります。製図のルールを無視したものになってしまいましたが、印刷して貼るのが目的なので気にしません。
シートメタルの設定が厚さ0.5mmとなっていたため深さ0.5の穴になってしまっていますが実際は貫通です。
印刷する用紙のサイズに合わせシートのサイズを変更し、尺度を1:1で印刷すれば実際のサイズで出てきます。
・準備サーボブラケットを作る前にアルミの折曲げ器をつくります。
なくても曲げることは可能ですが、あるときれいに折れるような気がします
http://minkara.carview.co.jp/userid/424653/car/337248/649180/note.aspxこのページを参考に作りました。ほぼパクリです。
用意したのは厚さ2.0mm、長さ1mのアルミアングル。
とりあえず半分に切って蝶番をつけて



持ち手を付けて完成。



精度は微妙ですが2000かかったかどうかくらいで出来たので良かったです。
1mmのアルミなら余裕で曲げられましたが、2mmはきついかもしれません。
また押さえる部分や曲げる部分が短い場合、これでは曲げることが出来ませんでした。(アルミアングルと全く干渉しない。短い部分を木の板とクランプで挟んで曲げました)
アルミ曲げ器を作りましたが木の板の間にアルミを挟んでクランプで締めて曲げても大して変わらなかったのではないかと思います。
・製作実際に作っていきます。まずサーボブラケットを印刷した紙を切ってアルミ板に貼っていきます。紙をアルミに貼るのにはスプレーのりを使いました。


1番最初にやって失敗したことなのですが下のように1枚のアルミに何枚も貼るのはすごく作業がしにくかったです。(何度も曲げることで金属を切断する方法を取ったため。
余裕をもって紙が貼れるようなサイズに切っておき紙を貼るのがいいと思いました。

切断ですが、
http://making.ti-da.net/e2405903.html ここに載ってるようにカッターで切り込みを入れて何回も曲げることで金属疲労で折るという方法を取りました。


切り込みを入れて、(穴を開ける位置と曲げる部分が分かればいいのでぼろぼろなのは気にしない)



板と板の間に挟んでクランプで締めて、余った部分をプライヤーで掴みグニャグニャする


亀裂が成長し切断完了!
後は切断面にヤスリをかけたりして終わりです。
次は穴あけですが、穴を開ける前にポンチを打ちます。ポンチを打たないと穴がきれいに空かないと思います。
ポンチがズレて結果、穴がズレることが結構ありました。ポンチを打つ位置がわかりやすくなるように印刷する図面の穴部分は十字中心線を入れておくのが重要だなと思いました。

その次は曲げです。
折り曲げ器を作ったのでそれを使います。
曲げたい線アルミアングルの角が合うようにセットし固定して曲げます。


結果こんな感じになります


曲げる部分をすべて曲げるとこうなります。(写真はブレブレですが・・・

CADで作ったモデルとほぼ同じ。
この後アルミに張り付いている紙はもう使わないのでシール剥がしなどで剥がしました。
試しにサーボと組み合わせてみました。





(撮影後、別のサーボ用(S03NなのにS03T)のアームを取り付けていたことが判明。10mmも長く出来上がってしまっておかしいなと思いつつ取った写真です。なので実際はもうちょっと短いアームです。この時はわざわざ10mm長い組ネジを買いに行きました・・・)
サーボのケーブルは短くこのままだとサーボドライバまで届かなかったりするので延長ケーブルを作りました。

線とソケットを何セットか買ってきてハンダ付けしました。この線はサーボのフタバ配列と同じ色だったので作った後もわかりやすかったです。
http://kenkitami.tonosama.jp/others/connector.html
このページを参考に作りました。コネクタのメスを作るときにはんだを載せ過ぎたりケーブルを入れすぎたりしたために挿しづらいコネクタとなってしまいました。
このページではサーボ用コネクタオスメスセットっとなっていますが、マルツでは2.54mmピッチコネクター 3ピンとしておいてありました。
このようなアルミ加工をするにあたってかなり参考にしたページ。
http://www.geocities.jp/mimiin/tips/kakou/kakou.htmlhttp://0n0.fc2web.com/kakou/bracket/bracket_02.htm・組み立て出来たサーボとサーボブラケット、アームを組み合わせアーム状にしていきます。

こんなかんじで組み合わせていきます。
一番下は木の板と棒を組み合わせて作った土台に穴を空け、360度回転可能なS125-1Tを入れています。
この組立て段階でいくつか問題がありました。
ほとんどがネジが締まらない!という問題です。
ブラケット曲がってる部分に干渉して締り切らない(サーボとブラケットを固定する部分)、ボルトに干渉し入らない(アームとブラケットの接続部分)、穴がずれててネジが通らない
問題にぶつかってCAD上で実際にネジを差し込んで確認するべきだったと思いました。
現状としては締り切らない部分は締められるとこまで締め、干渉し入らない部分はいれるのを諦め大きいボルト一個だけで支持しています。(強度上は全く問題ないのですが、自由度を制限?してないためブラケットが回転可能になってしまっている。結束バンドのようなものでアームとブラケットを固定することで解消可能なはず。)
穴がずれててネジが通らなかった部分に関しては穴を少し大きくすれば通ったので大丈夫でした。

最終的にこうなりました。
適当に何枚か写真取ったので上げます。




アームとブラケットのネジが干渉してしまう部分。

ハード編はとりあえず以上です。
ソフト編 [13回]
[13回]
